運動控制一直是以PLC、PC-based、專用控制器三分天下的形式各自發展,三者的市場份額也一直伴隨著不同市場的應用發生著變化。目前PLC市場占比41%,PC-based市場占比28%,專用控制器市場占比31%。
從產品進化的角度來看,PC-based運動控制器相較于專用控制器擁有更高的靈活度,在工業物聯網時代,功能上比PLC能夠實現面對更為復雜的場景;在一些行業中,PC-based或專用控制器正在逐步替代PLC,如在機器視覺領域的應用。那么對于提供運動控制器的廠商而言,只有不斷適應市場需求變化推陳出新,才能在這百億級的藍海市場中勇立潮頭。
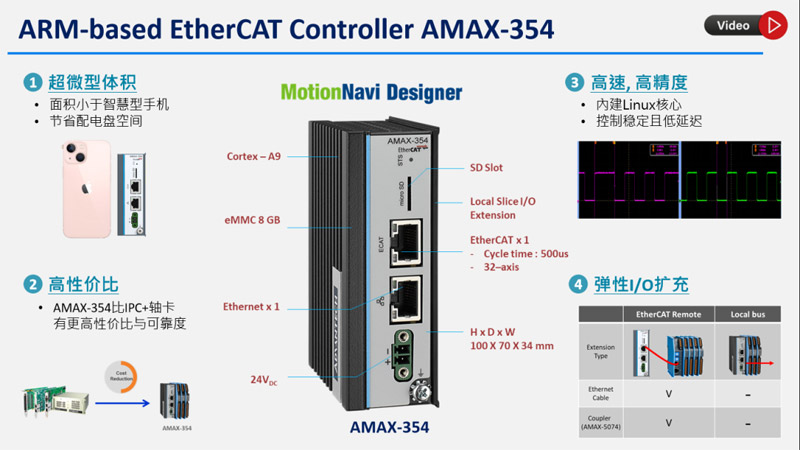
毫無疑問,就運動控制系統的發展趨勢來看,易使用、小型化、高性價比、模塊化和網絡化等是運動控制系統不斷迭代的方向。為此,深耕運動控制的研華推出了AMAX-354與AMAX-357控制器,充分滿足設備開發商與用戶的需求。

 而基于PC-based的AMAX-357走的是通用型控制系路線,為用戶預留了靈活的二次開發接口,設備制造商可根據其設備的控制需求編程開發控制系統,因此AMAX-357控制器具備開放與彈性的架構,為用戶打開了二次技術開發、工藝快速迭代升級的技術路徑,并為用戶自身核心競爭力構建提供了必要的技術手段。用戶可采用研華MotionNavi API進行程式開發,支持C/C++、VS.net等高級語言,提供完整范例程式,可快速上手與開發,并提供MQTT等通訊,使用戶可以將EthereCAT通訊所采集的OT數據進一步連接IT云端,實現工業4.0與物聯網的完美整合。
而基于PC-based的AMAX-357走的是通用型控制系路線,為用戶預留了靈活的二次開發接口,設備制造商可根據其設備的控制需求編程開發控制系統,因此AMAX-357控制器具備開放與彈性的架構,為用戶打開了二次技術開發、工藝快速迭代升級的技術路徑,并為用戶自身核心競爭力構建提供了必要的技術手段。用戶可采用研華MotionNavi API進行程式開發,支持C/C++、VS.net等高級語言,提供完整范例程式,可快速上手與開發,并提供MQTT等通訊,使用戶可以將EthereCAT通訊所采集的OT數據進一步連接IT云端,實現工業4.0與物聯網的完美整合。 AMAX-357誕生的一個主要目的是為了解決傳統工控機+板卡的控制方式引發的設備體積越來越大的問題,幫助用戶在緊湊有限的空間內實現高精運動控制。因此,從產品特點上來看,AMAX-357具有微型體積省配件省空間、對比IPC+軸卡方案AMAX-357控制器更省成本、一體化設計可靠度更高等優勢。
AMAX-357誕生的一個主要目的是為了解決傳統工控機+板卡的控制方式引發的設備體積越來越大的問題,幫助用戶在緊湊有限的空間內實現高精運動控制。因此,從產品特點上來看,AMAX-357具有微型體積省配件省空間、對比IPC+軸卡方案AMAX-357控制器更省成本、一體化設計可靠度更高等優勢。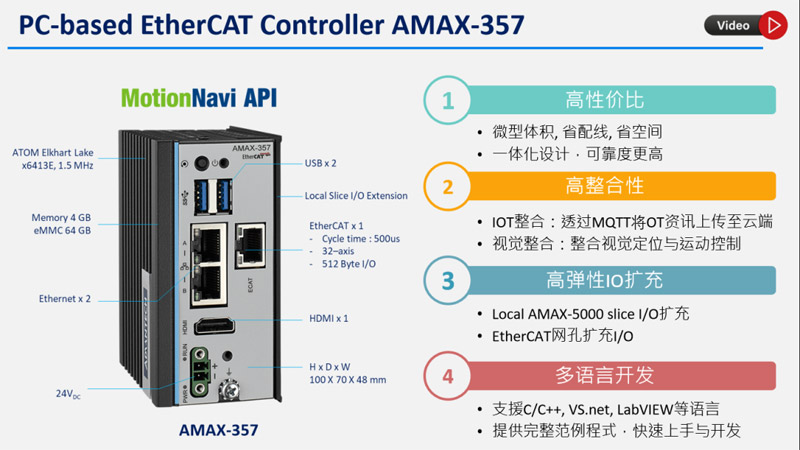 值得一提的是,研華MotionNavi Designer作為一款多樣化的開發工具,能夠實現彈性自定義,包括自定義變量和子程序,具有支持BASIC語言開發(包括Low-code開發、類Robot語言)、多線程(支持支援10 Task同時運行)、多樣通訊(Modbus TCP/IP for HMI、TCP/IP for Vision Integration)、檔案操作(存放工單、配置與Log檔案)等特點,能夠幫助用戶高效完成程序開發、機臺調試、設備生產、遠程調試、產品更換調試等場景下的工作。
值得一提的是,研華MotionNavi Designer作為一款多樣化的開發工具,能夠實現彈性自定義,包括自定義變量和子程序,具有支持BASIC語言開發(包括Low-code開發、類Robot語言)、多線程(支持支援10 Task同時運行)、多樣通訊(Modbus TCP/IP for HMI、TCP/IP for Vision Integration)、檔案操作(存放工單、配置與Log檔案)等特點,能夠幫助用戶高效完成程序開發、機臺調試、設備生產、遠程調試、產品更換調試等場景下的工作。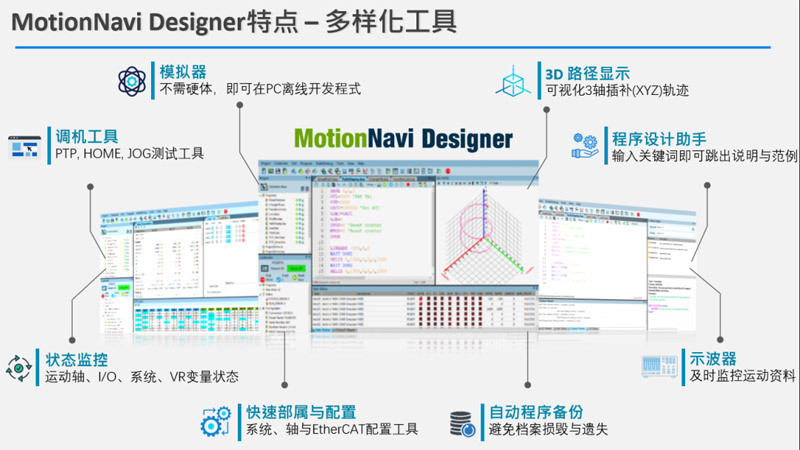 為適應需要,開發一體化的邏輯控制、運動控制、視覺控制開發平臺是高效、快速開發智能制造生產線和智能制造裝備的必然趨勢。傳統運動控制器雖然集成了PLC功能,但PLC和運動控制是相對獨立的兩套軟件,常需要I/O接口交互按數據實現同步等,造成成本高、系統復雜、維護困難。而基于研華AMAX-354、MotionNavi Designer的軟硬件一體的運動控制系統,以上問題迎刃而解,這一點在接下來的應用展示中亦可全面體現。
為適應需要,開發一體化的邏輯控制、運動控制、視覺控制開發平臺是高效、快速開發智能制造生產線和智能制造裝備的必然趨勢。傳統運動控制器雖然集成了PLC功能,但PLC和運動控制是相對獨立的兩套軟件,常需要I/O接口交互按數據實現同步等,造成成本高、系統復雜、維護困難。而基于研華AMAX-354、MotionNavi Designer的軟硬件一體的運動控制系統,以上問題迎刃而解,這一點在接下來的應用展示中亦可全面體現。
 在一條完整的產線中,隨著生產工藝的發展需求,控制的設備數量越來越多,實現的控制功能也日趨復雜。在過往,設計者都習慣將其控制在一個大型控制器當中,但因為系統技術發展逐漸龐大且復雜,導致控制系統不穩定性也逐漸提高。在系統正常運轉的情況下,將所有控制功能都集中在一起的弊端也許并不明顯,而一旦產線中的某一設備發生故障,客戶需要把整條產線都暫停以維修出現了問題的設備,直到設備恢復正常,才能整線啟動運作。由于停機所造成的生產進度延誤、生產效率受影響等等問題,卻是生產型客戶所不能容忍的。研華AMAX-354/357控制器,基于邊緣控制的概念,化繁為簡,客戶可以在設備運行過程中快速定位到故障設備,可以將故障的設備單元直接重啟或是移除,而不影響整條產線的正常運轉,從而降低產線故障停機時間。在生產效率至上的場景下,研華AMAX-354/357控制器即可輕松應對,解決您的后顧之憂。
在一條完整的產線中,隨著生產工藝的發展需求,控制的設備數量越來越多,實現的控制功能也日趨復雜。在過往,設計者都習慣將其控制在一個大型控制器當中,但因為系統技術發展逐漸龐大且復雜,導致控制系統不穩定性也逐漸提高。在系統正常運轉的情況下,將所有控制功能都集中在一起的弊端也許并不明顯,而一旦產線中的某一設備發生故障,客戶需要把整條產線都暫停以維修出現了問題的設備,直到設備恢復正常,才能整線啟動運作。由于停機所造成的生產進度延誤、生產效率受影響等等問題,卻是生產型客戶所不能容忍的。研華AMAX-354/357控制器,基于邊緣控制的概念,化繁為簡,客戶可以在設備運行過程中快速定位到故障設備,可以將故障的設備單元直接重啟或是移除,而不影響整條產線的正常運轉,從而降低產線故障停機時間。在生產效率至上的場景下,研華AMAX-354/357控制器即可輕松應對,解決您的后顧之憂。
 機器視覺的應用是一個復雜的系統,其中涉及到了光源、相機、底層算法、應用算法、運動控制等等模塊的配合,而往往懂機器視覺的廠商并不熟悉運動控制。對運動控制系統的開發,如何實現兩套系統的穩定交互實時高效聯動配合,如何處理當CPU的負荷過高、內存過大、處理流程過多時的卡頓現象,導致機器視覺在完成同一檢測任務生產節拍等等問題。此時,最需要的是把專業的事情交還給專業的人來做,視覺廠商的專長在視覺軟硬件方面,而運動控制則可由研華AMAX-354/357控制器來完成。AMAX-354/357的高可靠度、穩定度、低延遲、易開發等特點可完美適應這一場景。當然,機器視覺只是典型應用場景之一,在其余對運動控制要求相對不嚴苛的場合下,AMAX-354/357控制器均可作為“最佳配角”輕松承擔運動控制的角色。場景三設備空間有限
機器視覺的應用是一個復雜的系統,其中涉及到了光源、相機、底層算法、應用算法、運動控制等等模塊的配合,而往往懂機器視覺的廠商并不熟悉運動控制。對運動控制系統的開發,如何實現兩套系統的穩定交互實時高效聯動配合,如何處理當CPU的負荷過高、內存過大、處理流程過多時的卡頓現象,導致機器視覺在完成同一檢測任務生產節拍等等問題。此時,最需要的是把專業的事情交還給專業的人來做,視覺廠商的專長在視覺軟硬件方面,而運動控制則可由研華AMAX-354/357控制器來完成。AMAX-354/357的高可靠度、穩定度、低延遲、易開發等特點可完美適應這一場景。當然,機器視覺只是典型應用場景之一,在其余對運動控制要求相對不嚴苛的場合下,AMAX-354/357控制器均可作為“最佳配角”輕松承擔運動控制的角色。場景三設備空間有限